We are OUT OF STOCK on the surplus brushless DC motor we used to build this project, and since it's surplus we cannot get any more. The resistor and capacitor values listed in the schematic and on the PC board plan depend on using this exact same motor. You can use a different motor (for example, something salvaged from a dead hard disk drive), but many component values will change and you will have to experiment. Another option is to instead build our Bicycle Speedometer Anemometer, because that design depends on the motor only for its bearing -- the internal coils don't factor into the output frequency. Both the Otherpower.com staff and the circuit board designer are currently experimenting with new designs using surplus hard drive motors -- stay tuned, and feel free to ask questions on our Discussion Board.
UPDATE 06/20/2005 -- A fellow wind enthusiast with way more electronics knowledge than us has made up some CAD schematics of the electronics in this project, and PC board layouts. These are available free of charge farther on down in this web page. http://www.sentex.ca/~mec1995/wse/anemometer.htmlUPDATE -- I'm located in the mountains at 8200 feet elevation in Colorado, USA. The UV rays here are intense, you can get a sunburn in under 30 minutes here. The Easter eggs are made of styrene(?) plastic, and they degrade in the UV up here. I got 3 years from my design, after that the plastic became very brittle and broke apart. My solution was to find various anemometer cup sets online -- they are fairly common. UPDATE -- We've been building and flying Bicycle Speedometer Anemometers recently. The project is more expensive than this one, but it's simpler and easier to build. We used a commercial anemometer cup and hub assembly to save time, and an inexpensive digital bicycle speedometer to calculate speed and acquire data. Another cool project, check it out! And you can use the pre-built cup assembly on this Easter egg anemometer project, too, to save time. In any wind generator installation, it's critical to be able to measure wind speed. That gives you a baseline against which to measure your machine's performance, and anemometers respond much more quickly to changes in windspeed than do wind generators. Commercial anemometers are very expensive and the operational concept is pretty simple, so we decided it would be cheaper (and MUCH more fun) to build our own! Plastic Easter Egg halves made ideal (and very colorful) cups.

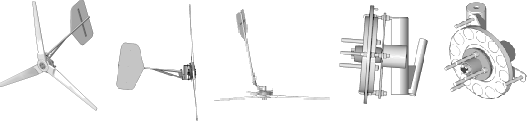
Our homemade anemometer...a fun project!
We chose a really neat little brushless DC permanent magnet motor as the basis for our DIY anemometer. The reason for this choice was simple...these motors contain a superb little ball bearing that would cost far more new than the entire motor cost surplus! In addition, the internal windings of the motor provide enough circuitry to calibrate the anemometer by both frequency and voltage output.
Brushless DC motor--note the really nice ball bearing!
In the past, we've built anemometers based on small DC hobby motors. While these units did work, there were problems to overcome. Most hobby motors use cheap bushings instead of bearings. The bushings tend to fail rather quickly, since they are not designed to withstand the forces put on them in an anemometer. Their voltage output is not linear with the windspeed, but instead tapers off as speeds get higher. And there is quite a bit of physical resistance in the motors, resulting in high startup speeds. The internal circuitry of our brushless DC motor consists of 12 coils, and a permanent magnet ring that spins around them. These motors are NOT like a normal DC motor...they require a special driver circuit to make them spin. If you apply plain DC current to the motor, it will simply seek a point aligned with the coils, stop, and burn out. The motors have 3 leads...a common in the center and 2 outputs (well, actually inputs!). For connection to measuring equipment, you need only connect to the center common lead and one of the side ones. The output of the motor when spun as an anemometer can be measured with a multimeter set for AC volts, or by counting pulses with a frequency meter or BASIC stamp. We had the best results using a Fluke 87 multimeter set for measuring Hz (cycles per second). There are 12 internal coils in the motor, but we only measured the output of half the coils (since we connected to only one power lead). Therefore, a meter reading of 6 Hz equals one revolution per second (60 rpm). Both frequency and voltage readings from the motor are quite linear, making for easy calibration. The other advantage of counting frequency over measuring voltage is that the length of the data cable would affect voltage readings; when counting frequency it can be any length and the calibration will stay the same.
Internal coil layout of the brushless DC PM motor
Materials and Tools Needed:- brushless DC PM Motor (check our products page, we do have these available surplus from time to time)
- 4 plastic Easter eggs, 2.2" dia. (use the hemispherical half)
- 3 short pieces of steel rod (we cut them from an old oven rack)
- 3 nuts to fit the steel rod
- 3 small self-tapping screws to mount the motor
- 1 piece of solid plastic for the hub, 1/4" thick, about 3" dia. (ours was Lexan®)
- 1 PVC 1 1/2" to 2" reducer
- 1 length of 1 1/2" PVC for the mast (2 ft or longer)
- 2-conductor wire for the data cable...telephone wire works great
- epoxy
 To build the cups and spider, first carefully drill 2 holes into the rim of each Easter egg half, about 1/4" to 3/8" in from the edge. Be sure the holes are aligned so the egg will hang straight on the rod. Cut the 3 rods to exactly the same length, so the weight will be equal. Weld or solder a nut to the end of each rod. Slide an egg half onto each rod, align them to vertical carefully, and glue them down with epoxy on both sides. After the epoxy cures, weigh the rods on a sensitive scales and file off the solder or weld material until the weights match exactly. Rough up rod ends with sandpaper, cover with epoxy, and insert the rod/cup assemblies into the hub. Be sure they are all inserted to the same depth to maintain hub balance. I also glued the edges of the cups to the hub directly with epoxy for added strength; with longer spider arms this would not be possible.
Cover the inside hole of the hub with epoxy, and press fit it tightly onto the motor. Epoxy the 4th egg half onto the top of the hub to cover the bearing as a weather shield. We turned a groove into the hub tob to accept the egg, but it should hold with just epoxy. Thread the data cable down through the piece of pipe you've cut for the mounting mast. That's it for construction! There are many variations to this design that could work equally well, if not better...in particular, the hub could be designed in many different ways depending on the materials and machine tools you have available.
I chose the anemometer diameter of 7.4" completely arbitrarily. As is, it starts spinning at about 8 mph, which is slightly below where our wind generators start spinning. It would be nice to have it respond in lower wind speeds; for the next one I'll probably extend the spider arms an inch or so to solve this. Lighter cups and hub would also help, but I wanted this unit to be very sturdy...we get winds in excess of 100 mph up here.
Calibration
This is the fun part! You may wish to build a vehicle mount for the anemometer, though it can be calibrated just fine by someone other than the driver holding it out the car window, away from the car's slipstream. If you choose to calibrate it without a mount, the holder should wear thick welding gloves and eye protection in case it comes apart. DanF's anemometer calibration rig is shown below...the unit rides a good 6 ft above the truck cab, out of the truck's slipsteam and turbulance. SAFETY NOTE: THERE ARE NO POWER LINES UP HERE WHERE THE CALIBRATION WAS DONE!!!! IF THERE ARE POWER LINES IN YOUR AREA, DO YOUR CALIBRATION SOMEWHERE ELSE, or use a lower mast!!!
To build the cups and spider, first carefully drill 2 holes into the rim of each Easter egg half, about 1/4" to 3/8" in from the edge. Be sure the holes are aligned so the egg will hang straight on the rod. Cut the 3 rods to exactly the same length, so the weight will be equal. Weld or solder a nut to the end of each rod. Slide an egg half onto each rod, align them to vertical carefully, and glue them down with epoxy on both sides. After the epoxy cures, weigh the rods on a sensitive scales and file off the solder or weld material until the weights match exactly. Rough up rod ends with sandpaper, cover with epoxy, and insert the rod/cup assemblies into the hub. Be sure they are all inserted to the same depth to maintain hub balance. I also glued the edges of the cups to the hub directly with epoxy for added strength; with longer spider arms this would not be possible.
Cover the inside hole of the hub with epoxy, and press fit it tightly onto the motor. Epoxy the 4th egg half onto the top of the hub to cover the bearing as a weather shield. We turned a groove into the hub tob to accept the egg, but it should hold with just epoxy. Thread the data cable down through the piece of pipe you've cut for the mounting mast. That's it for construction! There are many variations to this design that could work equally well, if not better...in particular, the hub could be designed in many different ways depending on the materials and machine tools you have available.
I chose the anemometer diameter of 7.4" completely arbitrarily. As is, it starts spinning at about 8 mph, which is slightly below where our wind generators start spinning. It would be nice to have it respond in lower wind speeds; for the next one I'll probably extend the spider arms an inch or so to solve this. Lighter cups and hub would also help, but I wanted this unit to be very sturdy...we get winds in excess of 100 mph up here.
Calibration
This is the fun part! You may wish to build a vehicle mount for the anemometer, though it can be calibrated just fine by someone other than the driver holding it out the car window, away from the car's slipstream. If you choose to calibrate it without a mount, the holder should wear thick welding gloves and eye protection in case it comes apart. DanF's anemometer calibration rig is shown below...the unit rides a good 6 ft above the truck cab, out of the truck's slipsteam and turbulance. SAFETY NOTE: THERE ARE NO POWER LINES UP HERE WHERE THE CALIBRATION WAS DONE!!!! IF THERE ARE POWER LINES IN YOUR AREA, DO YOUR CALIBRATION SOMEWHERE ELSE, or use a lower mast!!!

 Reading Wind Speed Directly
The simple solution for reading wind speed directly as mph was a quick paper template overlaid on the meter's "bar graph" display. While the numerals on the meter must be translated to get actual windspeed, the bar graph can be read directly against the calibrated paper template.
However, DanF has quite a silly fondness for large old analog meters--he wanted to watch windspeed on an excellent old 8"x10" analog microammeter (salvaged from a pH meter). The meter reads 0-500 microamps on a scale of 0-14 pH. The LM2917 frequency to voltage converter chip proved to be a perfect choice for this application...it can even drive much more powerful analog meters with no problems and minimal external circuitry. The chip costs under $3 at most electronics stores, and only 3 capacitors and 3 resistors are needed to get it working.
The LM2917 provides an output voltage proportional to the input frequency. It differs from the LM2907 in that it has an internal Zener diode voltage reference--the supply voltage can change without affecting the output. It can be used in many applications and configurations...in this case, it provides a 0-500 microamp current proportional to a frequency of about 0-90 Hz. With the anemometer design above, that means full scale (500 microamps) equals about 60 mph. DISCLAIMER: DanF is NOT an electronics expert. He still believes in 'magic smoke' inside electronics components...if you mess up and let the smoke out, it's very hard to put it back in the right places. He used extensive trial and error (plus some help from a member of the Otherpower.com message board) to get the resistor and capacitor values right...so there's no guarantee we will be able to help you if want to use this circuit in a different configuration! END DISCLAIMER. The manufacturer's data sheets for building circuits with this chip are located HERE, and have many useful charts, calculations, and schematics for possible circuits. The circuit was taken right from the 'application notes' pages. There is also an 8-pin version of the LM2917 available; the two are very similar, and the datasheet will tell you how to convert between them. All parts were purchased at Radio Shack, with the exception of the LM2917 chip--I had to go to an electronics store for it.
Reading Wind Speed Directly
The simple solution for reading wind speed directly as mph was a quick paper template overlaid on the meter's "bar graph" display. While the numerals on the meter must be translated to get actual windspeed, the bar graph can be read directly against the calibrated paper template.
However, DanF has quite a silly fondness for large old analog meters--he wanted to watch windspeed on an excellent old 8"x10" analog microammeter (salvaged from a pH meter). The meter reads 0-500 microamps on a scale of 0-14 pH. The LM2917 frequency to voltage converter chip proved to be a perfect choice for this application...it can even drive much more powerful analog meters with no problems and minimal external circuitry. The chip costs under $3 at most electronics stores, and only 3 capacitors and 3 resistors are needed to get it working.
The LM2917 provides an output voltage proportional to the input frequency. It differs from the LM2907 in that it has an internal Zener diode voltage reference--the supply voltage can change without affecting the output. It can be used in many applications and configurations...in this case, it provides a 0-500 microamp current proportional to a frequency of about 0-90 Hz. With the anemometer design above, that means full scale (500 microamps) equals about 60 mph. DISCLAIMER: DanF is NOT an electronics expert. He still believes in 'magic smoke' inside electronics components...if you mess up and let the smoke out, it's very hard to put it back in the right places. He used extensive trial and error (plus some help from a member of the Otherpower.com message board) to get the resistor and capacitor values right...so there's no guarantee we will be able to help you if want to use this circuit in a different configuration! END DISCLAIMER. The manufacturer's data sheets for building circuits with this chip are located HERE, and have many useful charts, calculations, and schematics for possible circuits. The circuit was taken right from the 'application notes' pages. There is also an 8-pin version of the LM2917 available; the two are very similar, and the datasheet will tell you how to convert between them. All parts were purchased at Radio Shack, with the exception of the LM2917 chip--I had to go to an electronics store for it.
 The 470 ohm resistor from pin 9 simply drops the supply voltage a bit. The circuit will work as-is from a 12-14v supply also. The meter can be any 0-500 microamp meter. The resistor from pins 10 and 5 sets the full-scale amperage for the meter...12K ohm gives you approximately full scale at 500 microamps; a trimmer pot could be added here if you want high precision. The 0.1 microfarad capacitor across the frequency input terminals is simply to filter out spurious signals...the chip is very sensitive, and will read frequencies seemly from nothing if not filtered. The other 2 capacitors and 100K ohm resistor were calculated right from the chip's datasheet....there's a chart and a formula for selecting them. All resistors are 1/4 watt.
Tony Van Roon in Canada did some CAD for us. Here are some much nicer versions of the schematic!
The 470 ohm resistor from pin 9 simply drops the supply voltage a bit. The circuit will work as-is from a 12-14v supply also. The meter can be any 0-500 microamp meter. The resistor from pins 10 and 5 sets the full-scale amperage for the meter...12K ohm gives you approximately full scale at 500 microamps; a trimmer pot could be added here if you want high precision. The 0.1 microfarad capacitor across the frequency input terminals is simply to filter out spurious signals...the chip is very sensitive, and will read frequencies seemly from nothing if not filtered. The other 2 capacitors and 100K ohm resistor were calculated right from the chip's datasheet....there's a chart and a formula for selecting them. All resistors are 1/4 watt.
Tony Van Roon in Canada did some CAD for us. Here are some much nicer versions of the schematic!
And here are the printed circuit board (PCB) layouts for the circuit. Feel free to use them if you have the gear for etching your own PCB (available at electronics stores or Radio Shack). You can buy the PC boards already etched right from Tony, for CHEAP. I figured my cost per hour for etching my own, and came to the conclusion that it's WAY cheaper to just order them from him:
http://www.sentex.ca/~mec1995/wse/anemometer.html
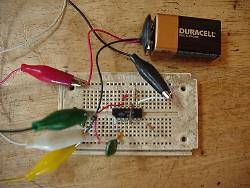
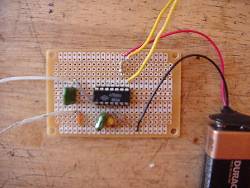
I first built the circuit on a solderless breadboard. I highly recommend this...unless you build the exact same circuit shown here and use the exact same motor for the anemometer, you'll need to adjust some or all of the component values. The breadboard makes this easy to do. Once everything is calibrated and working properly, switch the circuit over to a soldered version; PC boards are available at Radio Shack that match the connections inside the solderless breadboard. Buy a 50 cent IC socket for the chip, and solder that into the board instead of the chip itself! It could save you much grief...
 From your calibration procedure with the anemometer, you should have a listing of what frequency equals how many miles per hour. If your calibration was done on a windless day, it will be easy to figure out how many Hz equals how many miles per hour. In my case, it ended up that a 6 Hz frequency increase equalled a 4 mph windspeed increase. I did a final calibration check by spinning the anemometer at a constant speed, noting how many Hz were produced, and marking where on the meter this speed fell. In my case, 34 Hz = 25 mph = 4.6 pH (this was a pH meter to start with). I drew a new scale on white paper, matching the meter's, but with new tick marks for every 5 mph. I carefully glued this new scale on the meter face (being careful not to damage the needle), with the 34 Hz/25 mph/4.6 pH mark lined up as a calibration reference.
From your calibration procedure with the anemometer, you should have a listing of what frequency equals how many miles per hour. If your calibration was done on a windless day, it will be easy to figure out how many Hz equals how many miles per hour. In my case, it ended up that a 6 Hz frequency increase equalled a 4 mph windspeed increase. I did a final calibration check by spinning the anemometer at a constant speed, noting how many Hz were produced, and marking where on the meter this speed fell. In my case, 34 Hz = 25 mph = 4.6 pH (this was a pH meter to start with). I drew a new scale on white paper, matching the meter's, but with new tick marks for every 5 mph. I carefully glued this new scale on the meter face (being careful not to damage the needle), with the 34 Hz/25 mph/4.6 pH mark lined up as a calibration reference.
And, be sure to check out our book Homebrew Wind Power for more small wind power information!
 Since I wanted the unit to be portable, it is designed to run from a 9V battery. It's been running for over a week now (in fairly windy conditions) on this battery--power use is very low! Thanks to the chip's internal voltage reference, accuracy will not degrade as the battery is discharged...it will run until power is too low, and then stop completely. Meter deflection is very crisp and defined...when a gust hits the unit, the needle jumps up quickly. The scale is completely linear, unlike DC hobby motor anemometers in which the upper part of the scale is compressed. I am VERY pleased with how this project turned out. And so far, I have not let any of the magic smoke out of any components. ;~)
Since I wanted the unit to be portable, it is designed to run from a 9V battery. It's been running for over a week now (in fairly windy conditions) on this battery--power use is very low! Thanks to the chip's internal voltage reference, accuracy will not degrade as the battery is discharged...it will run until power is too low, and then stop completely. Meter deflection is very crisp and defined...when a gust hits the unit, the needle jumps up quickly. The scale is completely linear, unlike DC hobby motor anemometers in which the upper part of the scale is compressed. I am VERY pleased with how this project turned out. And so far, I have not let any of the magic smoke out of any components. ;~)
